
Robtica
Redação do Site Inovação Tecnológica – 25/02/2021
Um sistema neuromrfico constitudo por apenas 19 neurnios dirigiu um carro de verdade em condies reais.
[Imagem: Ramin Hasani]
Crebro de motorista
Uma equipe da ustria e dos EUA desenvolveu um sistema de inteligncia artificial neuromrfico que imita o funcionamento do sistema nervoso de animais como minhocas e lombrigas.
Embora no soe como um grande elogio para os motoristas, o fato que o sistema mostrou que no preciso ter um nmero gigantesco de neurnios para dirigir um automvel.
A equipe afirma que o sistema tem vantagens decisivas em relao aos modelos de aprendizado profundo atuais: Ele lida melhor com entradas cheias de rudos e, devido sua simplicidade, seu modo de operao pode ser explicado em detalhes, fugindo da tradicional “caixa preta” da inteligncia artificial.
O trabalho um melhoramento da tecnologia apresentada pela mesma equipe em 2018, quando eles estacionaram um pequeno rob usando 12 neurnios.
O sistema agora tem 19 neurnios e trabalhou com dados reais de imagens coletadas conforme motoristas humanos dirigiam carros em ambientes urbanos.
A rede neural para carros sem motorista inspirada biologicamente est sendo disponibilizada em cdigo aberto.
[Imagem: MIT/CSAIL]
Motorista neuromrfico
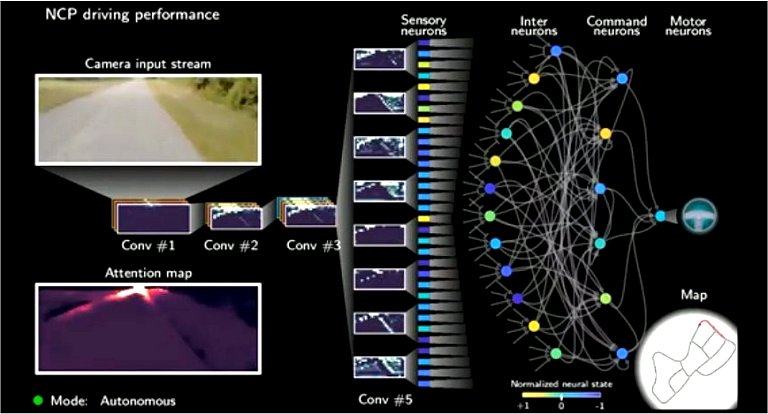
As imagens coletadas pelas cmeras no trnsito so primeiro processadas por uma rede neural convolucional, que pega apenas os dados visuais para extrair caractersticas estruturais dos pxeis de entrada. Essa rede decide quais partes da imagem so importantes e, em seguida, passa os sinais para a parte crucial da rede, um sistema de controle que dirige o veculo.
Os dois subsistemas foram empilhados e treinados simultaneamente com horas de vdeos de trnsito de um carro rodando na rea metropolitana de Boston. Para comear, foram fornecidas tambm informaes sobre como dirigir o carro em qualquer situao – at que o sistema tivesse aprendido a conectar automaticamente as imagens com o movimento apropriado do volante e poder lidar de forma independente com novas situaes.
O aparato todo foi testado em um carro autnomo rodando no campus da universidade.
“Nosso modelo nos permitiu investigar no que a rede foca sua ateno enquanto dirige. Nossas redes se concentram em partes muito especficas da imagem da cmera: O meio-fio e o horizonte. Esse comportamento altamente desejvel e nico entre os sistemas de inteligncia artificial,” disse Ramin Hasani, da Universidade de Tecnologia de Viena, na ustria. “Alm disso, vimos que o papel de cada clula em qualquer deciso de movimento pode ser identificado. Podemos entender a funo das clulas individuais e seu comportamento. Alcanar esse grau de interpretabilidade impossvel para modelos de aprendizado profundo maiores.”
O sistema de aprendizado profundo neuromrfico est sendo disponibilizado em cdigo aberto pela equipe, no endereo https://github.com/mlech26l/keras-ncp.
Artigo: Neural circuit policies enabling auditable autonomy
Autores: Mathias Lechner, Ramin Hasani, Alexander Amini, Thomas A. Henzinger, Daniela Rus, Radu Grosu
Revista: Nature Machine Intelligence
Vol.: 2, pages 642-652
DOI: 10.1038/s42256-020-00237-3

Outras notcias sobre:
Mais tópicos














{kind=link}
ENVIE UM COMENTÁRIO