
Robtica
Redação do Site Inovação Tecnológica – 08/02/2021
Diagrama esquemtico do novo tipo de junta robtica. As molas so conectadas por uma rvore de comando e um pequeno motor linear ajusta a dureza de cada mola.
[Imagem: TU-Chemnitz]
Articulao de rigidez varivel
O estudante Hongxi Zhu e sua professora Ulrike Thomas, da Universidade Chemnitz de Tecnologia, na Alemanha, desenvolveram um tipo inovador de junta robtica.
O mecanismo de um tipo conhecido como junta de conformidade (compliant), ou junta de rigidez varivel.
um mecanismo “flexvel” que transmite fora e movimento por meio da deformao elstica do dispositivo, derivando parte ou todo o seu movimento da flexibilidade relativa das suas peas, e no apenas com as articulaes de corpo rgido.
O objetivo principal da inovao tornar mais segura a interao humano-robtica.
Os dois engenheiros esto trabalhando neste novo conceito de junta robtica desde 2016.
As verses anteriores eram equipadas com sensores, principalmente sensores de fora, para medir as foras de contato em caso de coliso e para poder evit-las se necessrio. Outras tcnicas usam sensores pticos externos para monitorar a distncia entre robs e humanos.
A nova junta tenta simplesmente minimizar qualquer impacto, absorvendo energia graas a uma mola. Isso permite que a energia da coliso seja absorvida e o rob possa se mover mais rpido na proximidade de um humano sem coloc-lo em perigo.
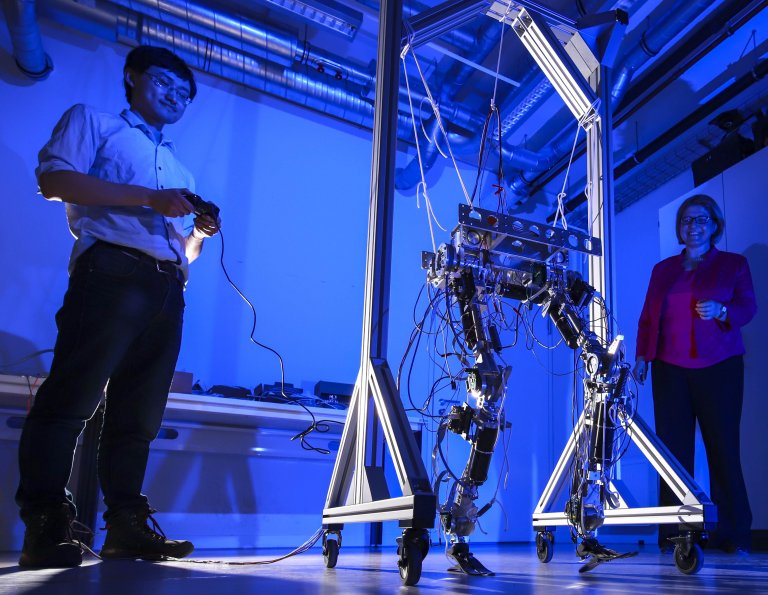
Zhu e Thomas agora querem integrar as juntas nos braos e pernas de um rob humanoide.
[Imagem: Jacob Mller]
Articulaes robticas
J existem outras articulaes robticas que usam molas para absorver a energia de uma coliso, mas o problema ser capaz de ajustar a dureza da mola de forma no-linear, para que os robs possam ajustar a rigidez e o amortecimento da junta de forma independente, adaptando-se a tarefas que requeiram foras elevadas.
Outra vantagem das articulaes de conformidade, ou complacentes, que a energia armazenada tambm pode ser usada para acelerar o movimento, de modo que um rob humanoide pode fazer tarefas como arremessar coisas ou pular.
Os dois engenheiros, que agora esto tentando comercializar a patente de sua nova junta, acreditam que robs desenvolvidos com seu mecanismo devero ser capazes de agarrar coisas com maior sensibilidade ou correr de forma mais estvel, tudo interagindo com segurana com os humanos.
Eles mesmos j esto pensando em usar a junta para criar assistentes robticos para hospitais, instalaes de cuidados ou mesmo para uso em casa.

Outras notcias sobre:
Mais tópicos















{kind=link}
ENVIE UM COMENTÁRIO